
Навигация
Категории
Мини-Чат
Опрос
Лучшие пользователи
Ник: Толик
Файлов: 744
Ник: cyber
Файлов: 159
Ник: waxirewion
Файлов: 59
Ник: Admin™
Файлов: 5
Партнеры

Статистика
Онлайн всего: 1
Гостей: 1
Пользователей: 0
| Главная » Файлы » |
Создан кошкоподобный робот
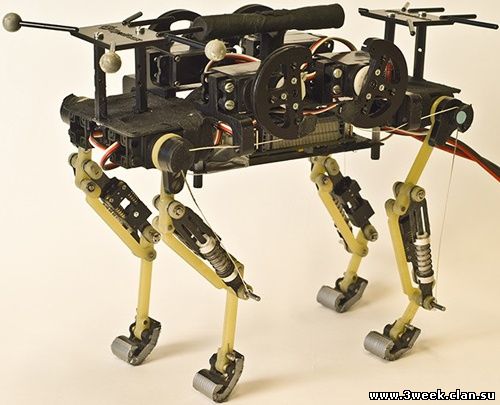
Лаборатория биоробототехники Федеральной политехнической школы Лозанны (Швейцария) представила прототип робота, бегающего подобно кошке.
Робокот построен с использованием относительно недорогих и доступных материалов и компонентов. Он снабжён четырьмя «лапами», каждая из которых имеет три сочленения. Роль сухожилий играют пружины, мышц — компактные электрические моторы.
Робот довольно быстр: за секунду он преодолевает расстояние, в семь раз превышающее длину его корпуса. При этом характер движения, по словам конструкторов, максимально приближён к бегу обычной кошки.
Механический «мурлыка» оснащён системой автоматической стабилизации, позволяющей поддерживать равновесие и преодолевать небольшие приступки. Разработчики подчёркивают, что робот очень лёгок, компактен и вынослив.
Основная цель создания устройства заключается в разработке платформы для изучения особенностей передвижения живых организмов. Кроме того, робот пригодится при биомеханических исследованиях.
В будущем, как ожидается, роботизированные коты смогут применяться при поисково-спасательных и разведывательных работах. Их небольшие размеры, способность сохранять равновесие и быстро передвигаться могут оказаться незаменимыми при использовании на пересечённой местности и внутри зданий.
Очевидно, что робокоты могут иметь различные датчики, видеокамеру и пр. Но пока, говорят исследователи, проект находится на экспериментальной стадии.
Вот как это выглядит:
Шагающих роботов «семейства кошачьих» разрабатывают и другие коллективы. Так, американская компания Boston Dynamics осенью прошлого года представила механического «Гепарда» (Cheetah), сумевшего впервые в истории пробежать быстрее человека. Это чудо робототехники достигло скорости в 45,5 км/ч, превысив тем самым рекорд Усэйна Сент-Лео Болта, установленный им в 2009 году: человек-ракета с Ямайки тогда пронёсся 100 м за 9,58 с (37,6 км/ч).
Роботов, внешне напоминающих кошек, также можно построить на модульной платформе Linkbot. Базовый блок содержит микроконтроллер Atmel ATmega128RFA1 с интегрированным радиочастотным (2,4 ГГц) приёмопередатчиком, аккумуляторную батарею, трёхосный акселерометр, зуммер, многоцветный светодиодный индикатор и коннектор MicroUSB. Модули могут обмениваться данными посредством ZigBee-связи в радиусе 100 метров. К блокам Linkbot можно подсоединять колёса, различные манипуляторы и дополнительные аксессуары.
| Всего комментариев: 0 | |